🤖 ROS
Robot Operating System,我们的核心开发平台。可以理解为有着各种工具的工具箱,用于开发视觉处理、路径规划等功能包。
嗨,你好啊。欢迎加入 HUAT FSAC 无人系统部 👏,在这里开始你的第一步学习吧。
首先介绍一下无人系统部所用的软件与开发平台。
🤖 ROS
Robot Operating System,我们的核心开发平台。可以理解为有着各种工具的工具箱,用于开发视觉处理、路径规划等功能包。
🐧 Linux
ROS 运行在 Linux 之上,掌握部分 Linux 知识是必须的。推荐使用 Ubuntu 18.04 LTS。
💻 VS Code
我们推荐的代码编辑器,当然你也可以使用其他熟悉的 IDE。
📝 C++ / Python
ROS 支持的两种开发语言,可按喜好自由选择。
在你的学习过程中,我们希望你能:
选择 Ubuntu 安装方式
ROS 与 Ubuntu 兼容性最好,我们需要先安装一个 Linux 操作系统。
安装 Ubuntu 18.04
根据下方指南选择适合你的安装方式。
学习 Linux 命令行
掌握基础的终端操作命令。
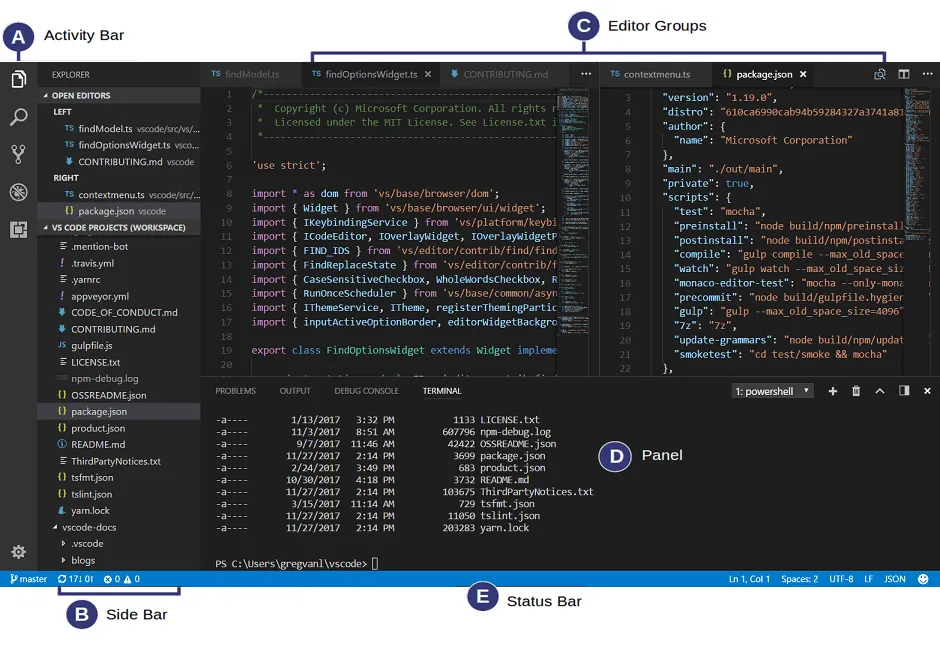
安装配置 VS Code
搭建开发环境。
![]()
推荐新手使用 通过 VMWare Workstation 部署 Ubuntu 虚拟机。 优点: - 简单易上手 - 与主系统隔离,不怕搞坏 安装步骤: 1. 下载 VMware Workstation 2. 搜索 “vmware ubuntu 18.04 安装” 按教程操作 3. 建议分配 4GB+ 内存,40GB+ 硬盘
适合 Windows 11 用户 Windows Subsystem for Linux,原生运行 Linux 环境。 优点: - 无需大镜像文件 - 启动快,安装/卸载方便 - 与 Windows 融合度高 参考教程: Dev on Windows with WSL
更多参考: - 知乎教程 1 - 少数派教程 - CSDN 教程追求性能的选择 直接在真机上安装 Ubuntu 系统。 优点: - 无虚拟化性能损耗 - 完整的系统体验 缺点: - 需要独立分区或硬盘 - 操作有一定风险 建议有经验的同学尝试双系统安装。
快速部署 使用 Docker 镜像部署 Ubuntu 环境。 优点: - 即刻完成部署 - 环境一致性好 适合有 Docker 基础的同学。
假定你已经成功完成了 Ubuntu 18.04 的安装,下面介绍基础操作。
📚 推荐教程
Linux 漫游指南 - 一份优秀的 Linux 入门教程
在 Ubuntu 桌面上:
Ctrl + Alt + T 打开终端Windows 键,输入 terminal 后回车遇到不懂的命令?搜索格式:linux 命令 ls 是什么
Linux 下安装 deb 包:搜索 ubuntu 安装 deb 包 获取教程。
如果你是大一新生,可能正在学习 C 语言。
那就继续跟着课程学习,没问题!
推荐阅读以下书籍: - 📘 Essential C++ - C++ 入门经典 - 📗 C++ Primer Plus - 全面深入的 C++ 教程
什么是 Git?
Git 是一个分布式的代码版本控制系统。通过 Git,你可以: - ⏪ 一键将代码回退至任意版本 - 🌿 使用”分支”在不影响主代码的情况下开发新功能 - 👥 团队协作开发
🤖 什么是 ROS?
ROS 是一个适用于机器人的开源元操作系统。它提供: - 硬件抽象 - 底层设备控制 - 常用函数实现 - 进程间消息传递 - 包管理 详情参考 ROS 官方文档
参考以下链接,理解 ROS 节点间的通信方式:
理解节点 (Nodes)
理解话题 (Topics)
编写发布者/订阅者
打开微信扫一扫,分享给朋友