INS5711DAA 惯导配置
约 1 分钟阅读 0%
购入时间:2024 年
| 名称 | 数量 |
|---|---|
| 组合导航(小盒子) | 1 |
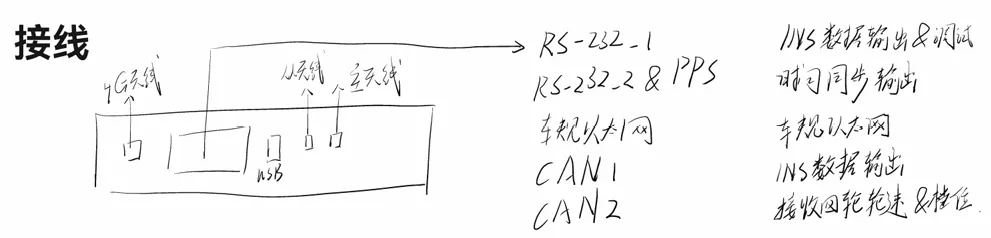
| 总数据连接线(电源线、RS-232、RS-232&PPS、车载以太网、CAN1、CAN2) | 1 |
| 4G 天线(需粘贴固定) | 1 |
| RS-232 转 USB(绿联,接到 RS-232 那条线上再连接至电脑或工控机即可) | 1 |
| 天线连接线(主蓝红从) | 2 |
| GNSS 测量天线(两个蘑菇) | 2 |
- USB 驱动文件夹 - 需安装到电脑上,请遵照文件夹内的 USB 驱动安装说明进行安装
- 主机及配件数模图 - 包含小盒子、两个蘑菇及 4G 天线的 stp 文件,可用 Catia 打开
- 使用说明书文件夹 - 包含组合惯导的使用说明书及 RTK 配置方法
- 上位机软件文件夹 - 包含上位机软件压缩包及使用说明
- 驱动文件夹 - 包含 pbox_node_drive 压缩包及 ROS 驱动使用说明
小盒子安装要求
Section titled “小盒子安装要求”- 与车体(车体或支架)刚性连接
- 安装在非直接淋水的位置
- 远离振动源(如发动机),距离 > 30cm,若小于可增加橡胶、塑料件等阻尼
- 远离温度变化剧烈的区域
- 主线缆接口处至少预留 15cm 空隙
- 与周边结构的空隙必须 > 1cm,安装孔上预留安装工具操作的空间
- 远离 EMC 干扰源,与 3A 以上大电流线束距离 >= 20cm
- 安装标定结束后不可拆卸移动(移动需重新标定)
- 安装面与车的水平面平行
- 设备轴线与垂直方向夹角较小
- 定位模组外壳接地
天线安装要求
Section titled “天线安装要求”安装位置要求:
- 两个天线距离 > 1m
- 天线安装俯仰角(Pitch)< 20°
- 远离电磁干扰信号的位置,距离 >= 30cm
- 天线安装平面平整、连接稳定
馈线连接要求:
- 远离其他线束、信号源的干扰
- 排线避免捆束放置
常用布局:
- 从天线在前,主天线在后,南北方向(因为车的设计,一般是这种方式)
- 主天线在左,从天线在右,东西方向
- 从天线位于主天线北偏东 30° 方向上
- 从天线位于主天线北偏西 40° 方向上
上位机连接配置
Section titled “上位机连接配置”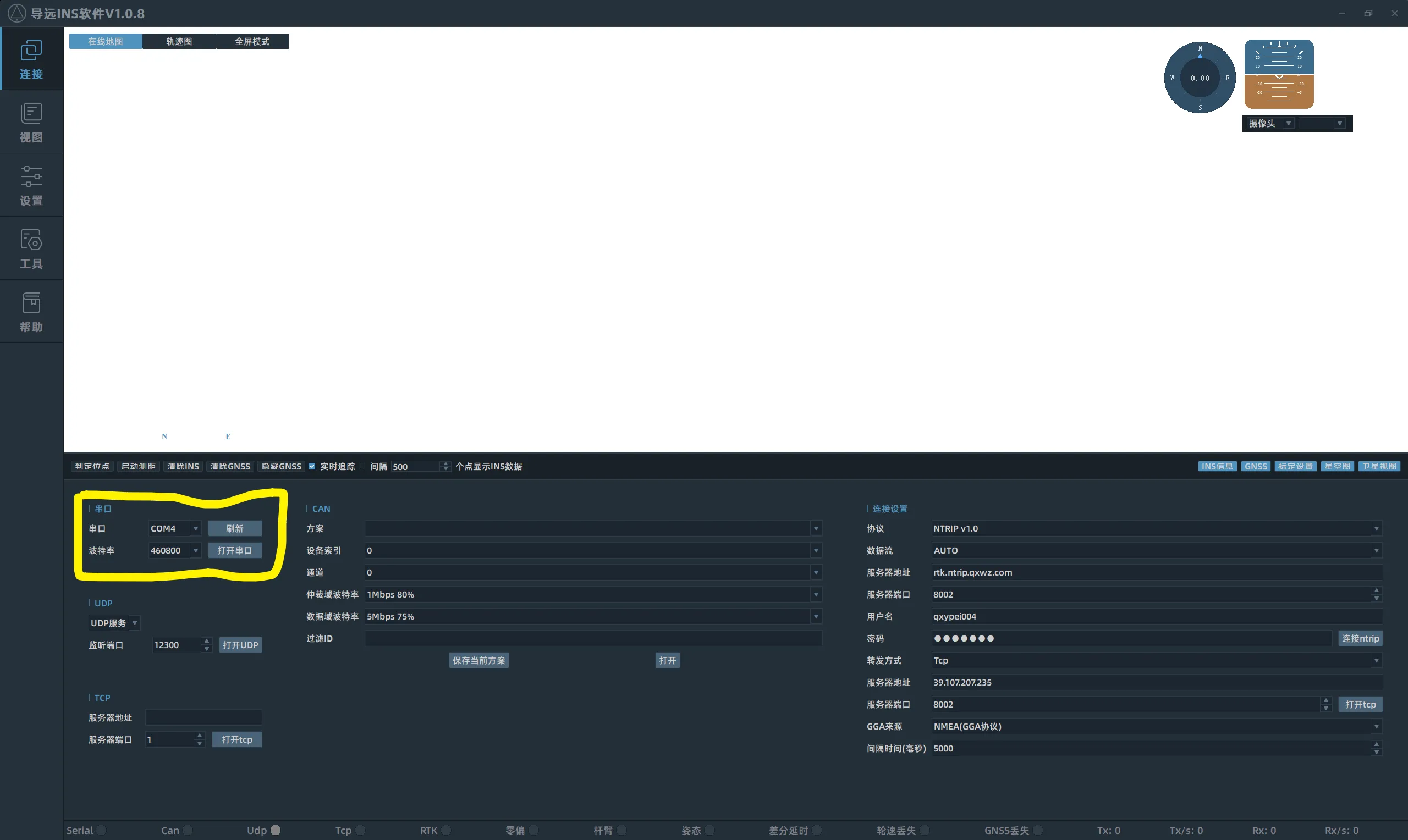
- 刷新串口
- 选择惯导 USB 插入电脑端的端口号(可观察设备管理器)
- 设置波特率打开串口(默认即可,若更改需更改惯导驱动里的 launch 设置)
RTK 服务配置
Section titled “RTK 服务配置”根据千寻位置 APP 中控制台 -> 产品管理 -> 千寻知寸 中的差分账号的相关账密信息进行配置。
方法一:连接界面
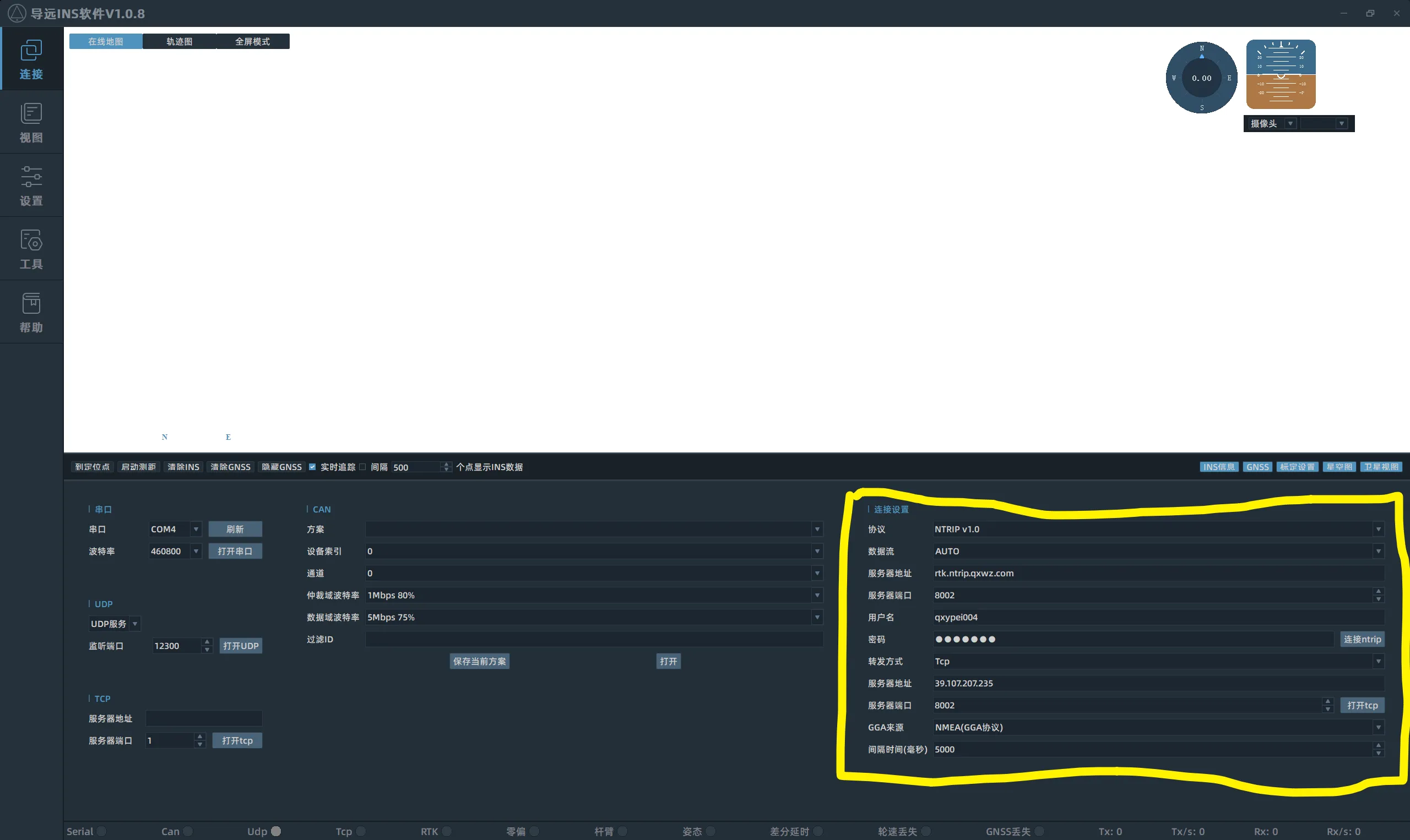
配置好后点击连接 ntrip。
方法二:设置界面
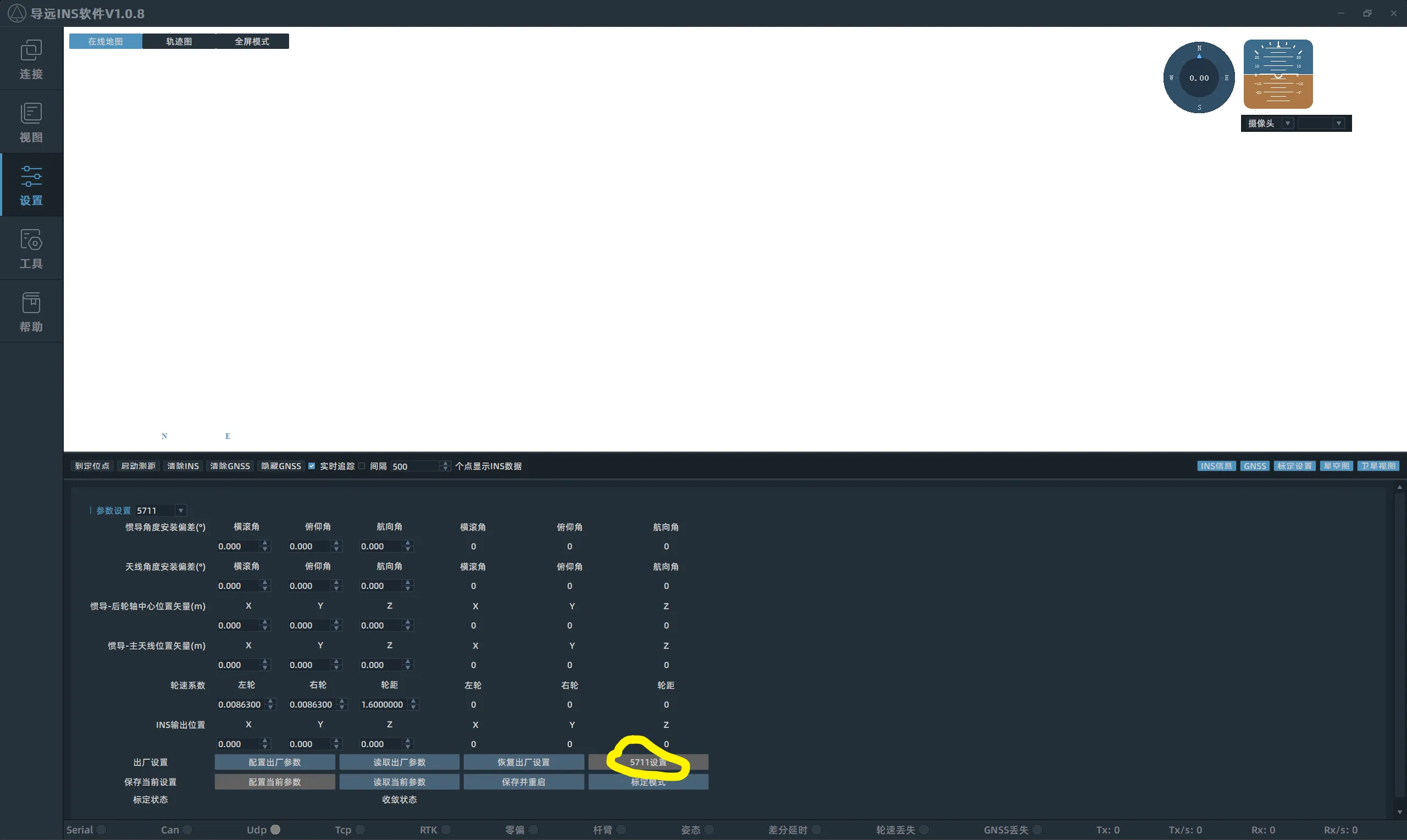
点击 5711 设置,在 RTK 中配置相关信息完后,再点击设定按钮。
当下方 RTK 显示蓝色即为配置成功。
-
恢复出厂设置
在设置界面,点击”恢复出厂设置” → “保存并重启”,等待 10 秒,再点击”读取出厂参数”,确定读取界面参数皆为 0。
-
配置相关安装偏差
车辆停放水平,放置于室外,观察视图界面,在设置界面写入相应偏差:
- 根据 INS 协议中的横滚角及俯仰角数值,在参数设置中取反写入
- 天线安装角度偏差横滚角为 0,根据 GNSS 协议中的俯仰角和航向角数值直接写入
- 测量组合导航质点到后轮轴中心的 x、y、z 距离(车头为 x 轴正向,车右为 y 轴正向,车下为 z 轴正向)
-
执行标定
点击”标定模式”,下方标定状态变更为”自动标定中”。开始跑动前在工具界面记录日志。跑个”日”字型(包含左转、右转、直行)。当标定状态变更为”标定成功”,在工具界面”停止录制”,再在设置界面点击”保存并重启”,等待 10 秒。
常见故障分析及解决措施
Section titled “常见故障分析及解决措施”
电源指示灯异常:
- 检查电源接线是否正常
- 供电电压是否正常 9~32 VDC
- 确认电流是否正常(约 0.5A)
工作状态指示灯异常:
- 检查 GNSS 指示灯状态
- 打开上位机检查 PPS 灯是否正常闪烁
- 检查 GNSS 协议的俯仰角是否超过 20°
GNSS 指示灯异常:
- 熄灭:检查所处位置能否正常收星,或检查馈线接线
- 慢闪:检查差分定位配置,4G 网络是否正常,差分账号是否过期
- 快闪:属于正常现象,暂未能得到固定解
4G 网络指示灯异常:
- 闪烁:检查差分账号配置是否正确及是否过期
- 熄灭:检查 SIM 是否插入,是否过期欠费
根据上位机软件中配置的串口波特率以及工控机中的设备连接更改 launch 文件:
<!-- 连接类型:serial port:0 , UDP:1 --><param name="ConnectionType" type="int" value="1" />
<!-- 串口设备串 default: /dev/ttyUSB0 --><param name="UART_Port" type="string" value="/dev/ttyUSB0" />
<!-- 串口波特率 default: 115200 --><param name="UART_Baudrate" type="int" value="230400" />启动驱动前需给权限:
sudo chmod 777 /dev/ttyUSB0微信扫码分享
打开微信扫一扫,分享给朋友