仿真平台
约 1 分钟阅读 0%
以下是关于 HUAT 无人仿真相关的一些知识点,希望这些可以帮助以后的学弟学妹。以上资料仅作参考,剩下的还需要自己多多了解,如果有错误的地方还请斧正。
仿真平台对比
Section titled “仿真平台对比”简介:我了解到的第一款仿真软件,由 AMZ Racing 开发。
技术栈:
- 基于 ROS1 (Ubuntu 18.04)
- 使用 Gazebo 和 RViz 进行模拟仿真
GitHub:AMZ-Racing/fssim
使用说明:
- 可以在项目中修改 SDF 文件来切换对应的赛道环境
- 启动相关节点即可运行仿真
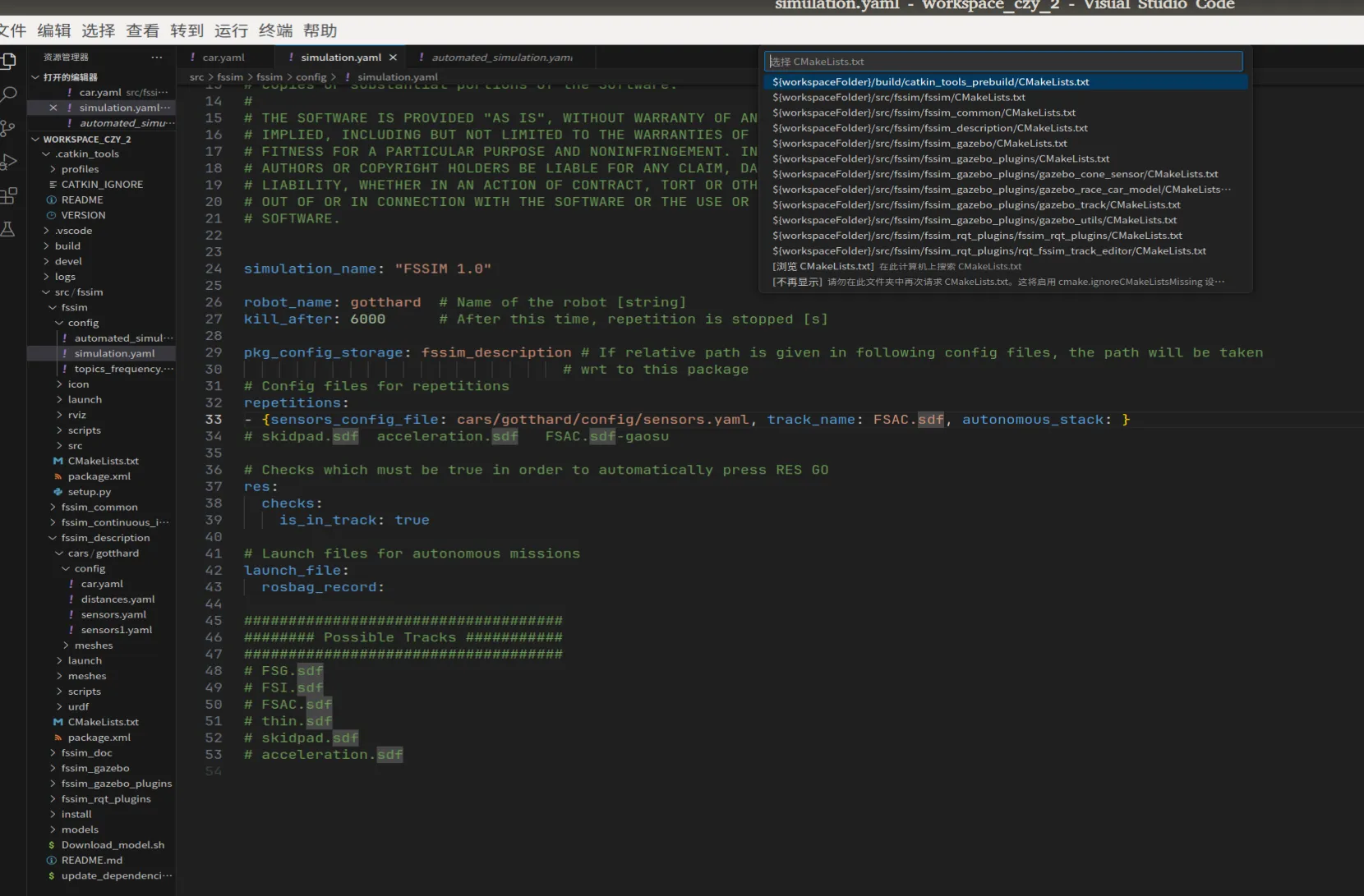
如下图可以启动高速循迹的相关仿真节点:
适用场景:八字绕环、直线加速、高速循迹等赛项的仿真测试
FSDS (Formula Student Driverless Simulator)
Section titled “FSDS (Formula Student Driverless Simulator)”简介:通过与其他车队交流了解到的仿真平台。
技术栈:
- 基于虚幻引擎 (UE4) + AirSim
- 拥有极高的视觉保真度
GitHub:FS-Driverless/Formula-Student-Driverless-Simulator
推荐度:⭐⭐⭐⭐⭐ 目前最可靠和实用的选择
f1tenth_gym_ros
Section titled “f1tenth_gym_ros”简介:主要用于 F1TENTH 微型赛车设计的轻量级仿真环境。
GitHub:f1tenth/f1tenth_gym_ros
个人对仿真的看法
Section titled “个人对仿真的看法”从今年的答辩环节来看,裁判的提问重心已经从仿真的概念性知识转移到整车测试的环节上了。
核心观点:
- 仿真只是为了让实车测试有个大概的数据指标
- 在整体环节上起不到太大的作用
- 也不能消除仿真和实车测试的相关误差
一个简单的例子:
仿真的机械结构是定死的,但实车的机械结构是不能预料的,会与你预想中的有很大的偏差。不如学习福州大学(24年冠军)说的那样:“我们没有仿真,直接上实车调参”来的更有说服力。
推荐资源:FSAE-TJU 方程式赛车仿真平台(天津大学开源)
以下是今年的答辩问题汇总:
仿真测试相关
Section titled “仿真测试相关”| 序号 | 问题 |
|---|---|
| 1 | 整体测试如何规划? |
| 2 | 对整车的设计流程是否有计划? |
| 3 | 对设备的选型如何抉择,策略是什么? |
| 4 | 整体测试是从小到大还是一步步来,还是说直接上实车进行验证? |
| 5 | 你认为目前赛车的整体进度完成了多少,还有什么不足?有没有什么没解决的问题?现在解决了没有? |
| 6 | 有没有相关资料储备?比如代码如何管理、相关的问题出现后的解决情况,有没有解决后续有没有出现? |
| 7 | 在测试环节方面,是使用控制变量法还是交替使用各种方法进行验证,是否进行了相关技术的检验? |
无人系统相关
Section titled “无人系统相关”| 序号 | 问题 |
|---|---|
| 8 | 站在最高角度上,什么因素制约的车队的发展? |
| 9 | 无人系统指的是什么,整体的部分是什么安排的? |
| 10 | 整体规划是由谁负责,有没有资料留存? |
| 11 | 时间同步有没有实现? |
| 12 | 有没有制作关于安全的冗余措施,具体是如何实现的? |
蔡俊翔 / 24-25 赛季算法组
