适用系统
Linux (Ubuntu)
适用系统
Linux (Ubuntu)
容器技术
Docker
GUI 支持
X11 (Xorg)
难度
ROS 官方严格限制了各 ROS 版本与操作系统间的对应关系。如 ROS1 Melodic 就对应 Ubuntu 18.04 LTS。跨版本的安装是不被支持的。
安装 Docker
移步至 Docker 官网教程 进行安装。
验证安装
在终端输入 docker -v 检查:

配置用户权限
如果无法执行 docker ps 等命令,执行:
sudo usermod -aG docker $USERdocker pull fishros2/ros:melodic-desktop-full默认 ROS 源
OSRF 源
fishros2 源
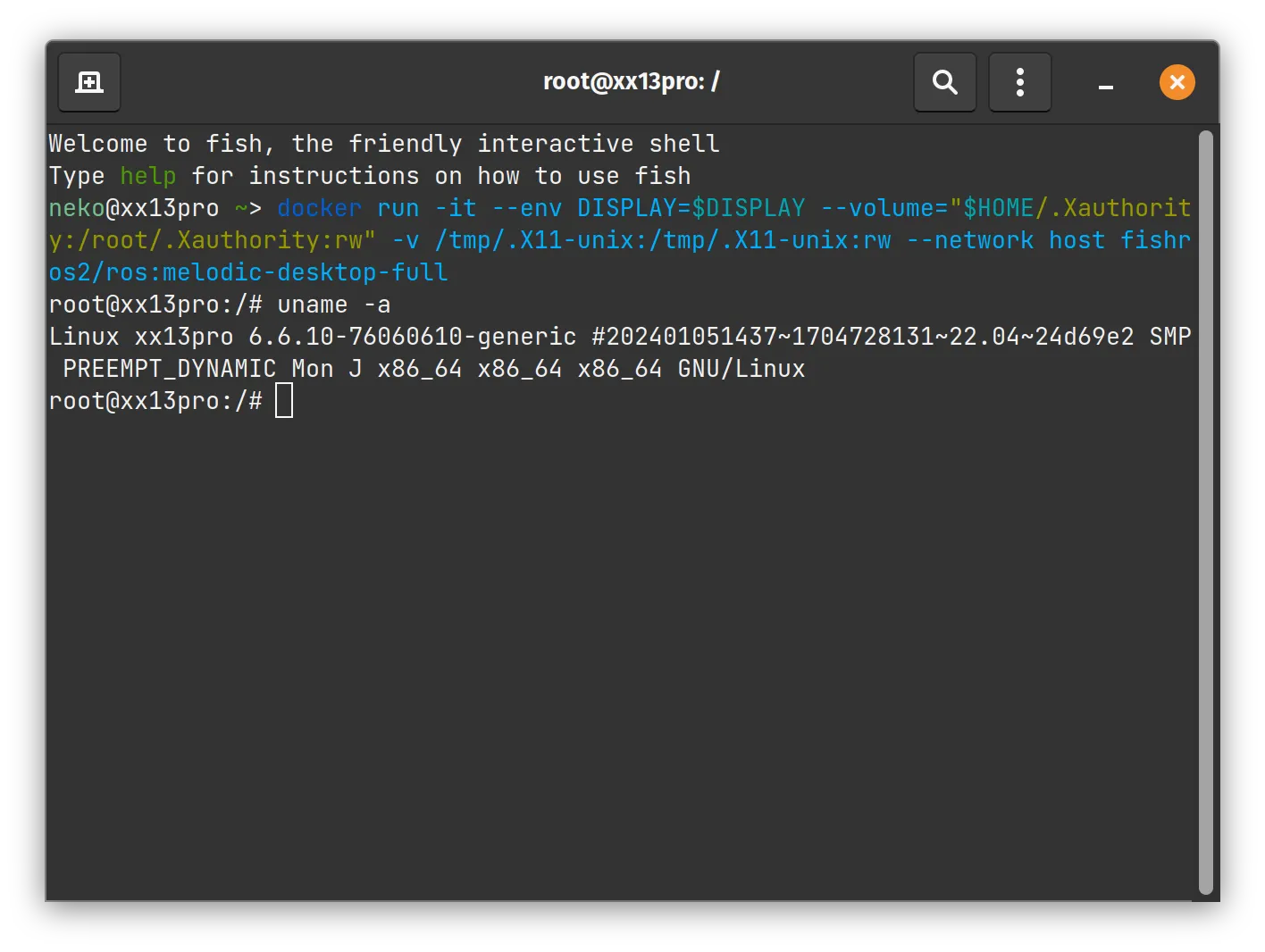
docker run -it --env DISPLAY=$DISPLAY --volume="$HOME/.Xauthority:/root/.Xauthority:rw" -v /tmp/.X11-unix:/tmp/.X11-unix:rw --network host fishros2/ros:melodic-desktop-full执行以上命令,待完成后则默认进入 Docker 环境。
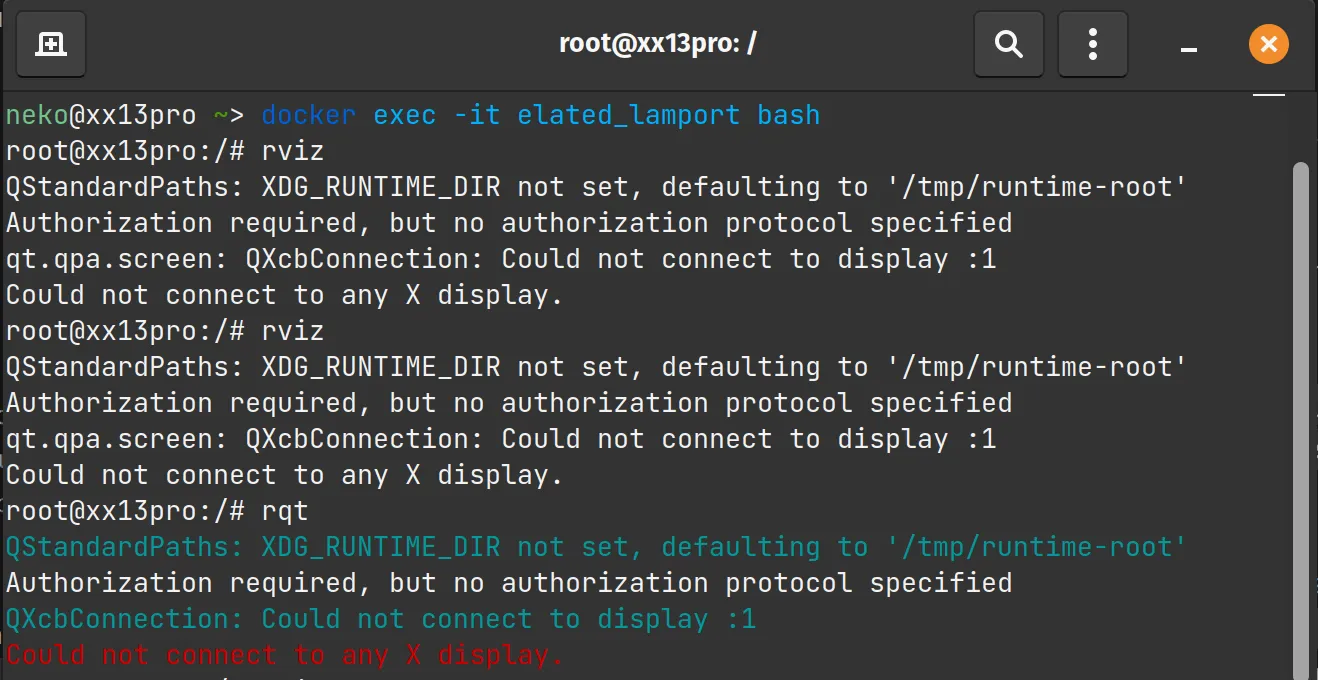
X11 窗口系统默认的安全配置不允许来自 Docker 的窗口连接。
在本地终端执行
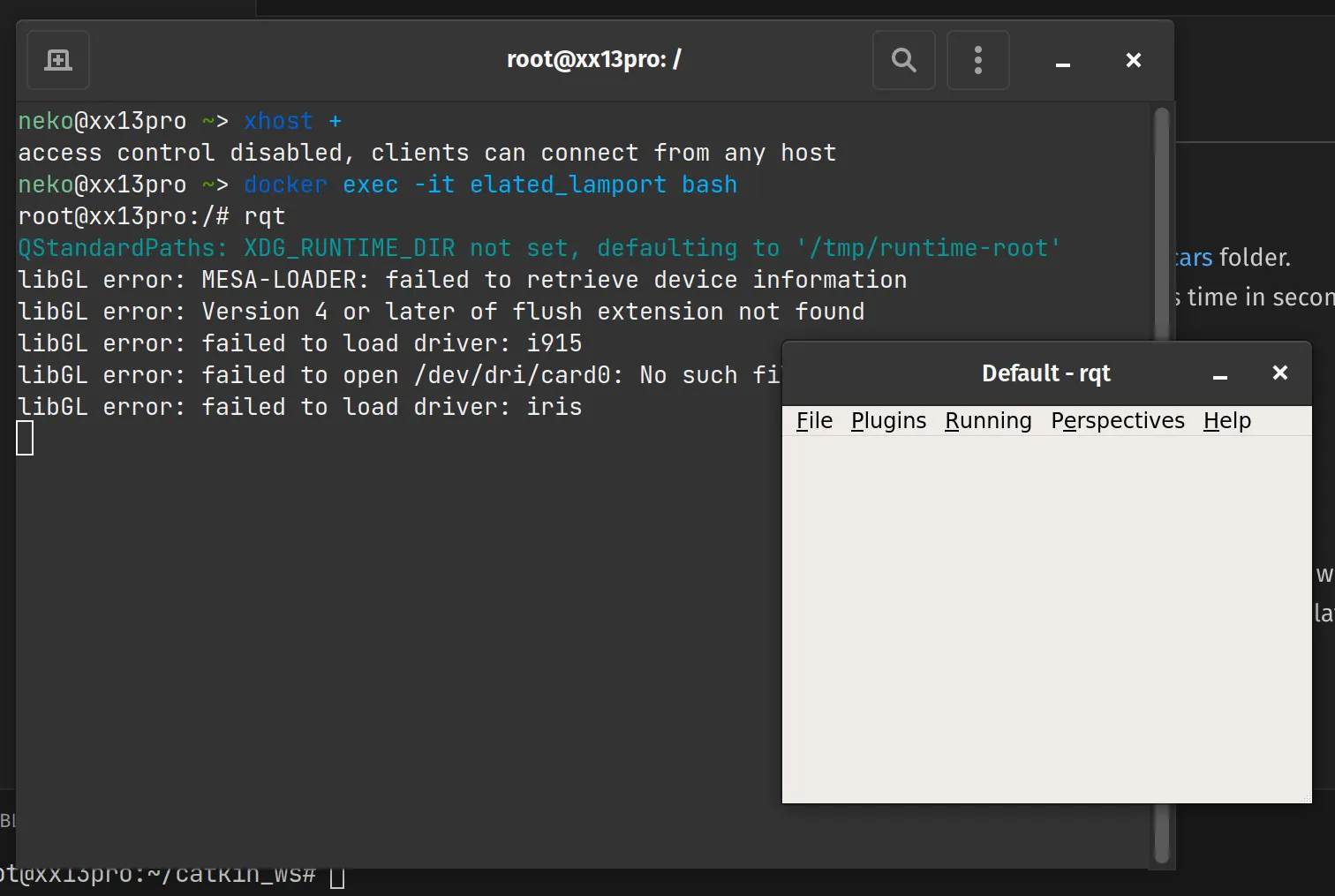
xhost +允许所有连接
在 Docker 内测试 GUI
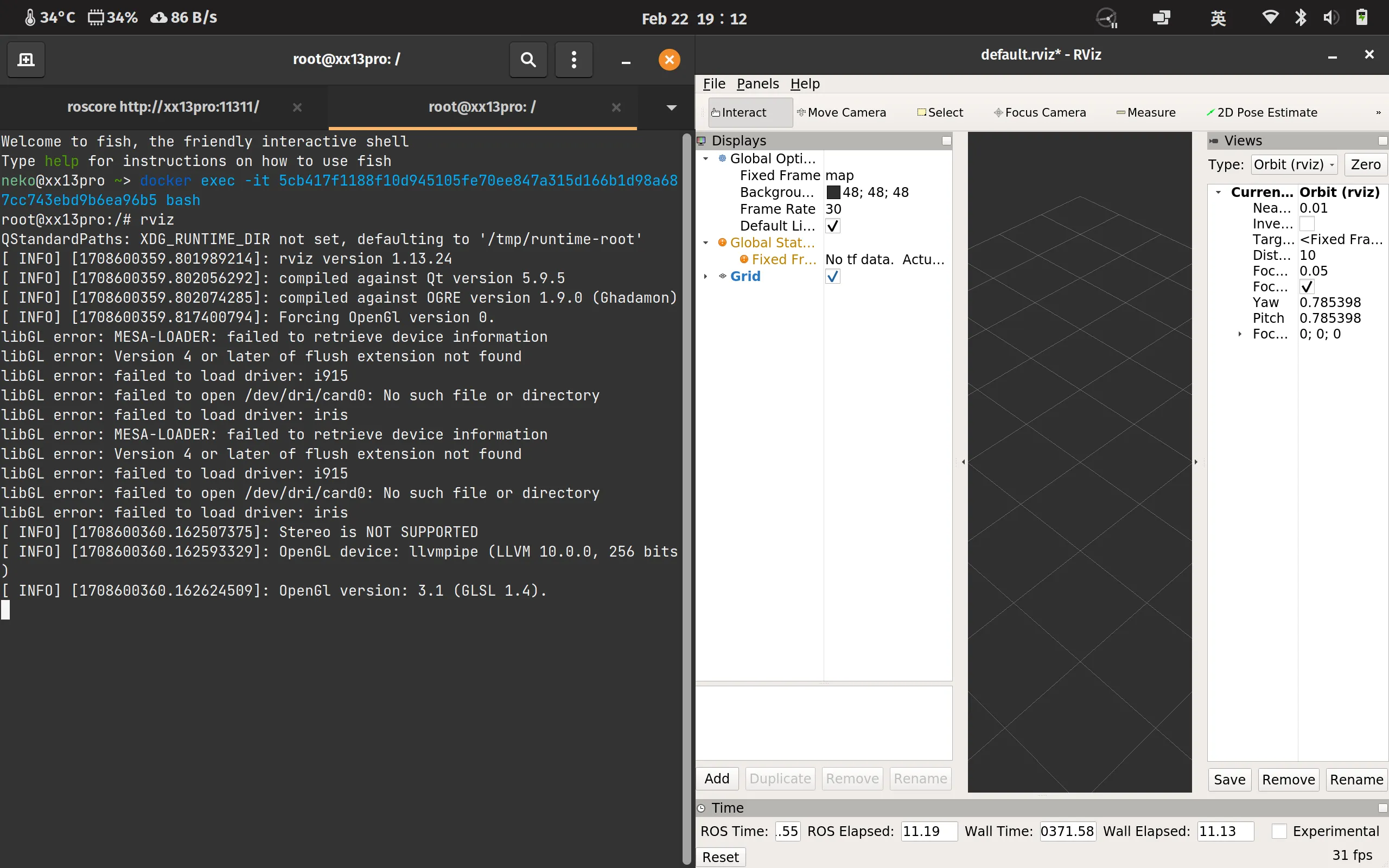
rqt# 或roscore &rvizrqt 启动成功
rviz 启动成功
打开微信扫一扫,分享给朋友