🎯 核心职责
环境感知、目标检测、传感器融合
🎯 核心职责
环境感知、目标检测、传感器融合
🔧 主要传感器
激光雷达、工业相机、双目相机
📊 输出数据
锥桶位置、颜色分类、障碍物信息
⚡ 技术栈
ROS、OpenCV、PCL、PyTorch
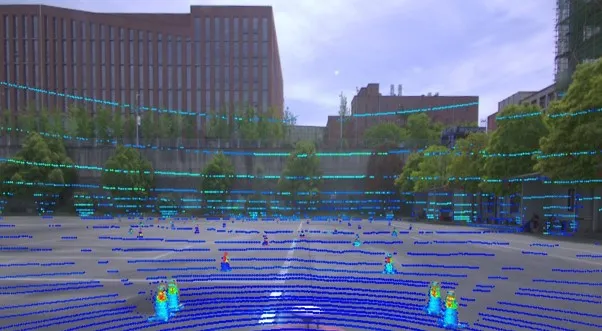

感知组通过使用相机、激光雷达等环境感知传感器检测赛车周围障碍物的位置、类型、颜色等信息,同时将处理后的数据下发给各个无人系统。
激光雷达感知
视觉感知
传感器融合
ROS
机器人操作系统,用于节点通信与数据传输
OpenCV
计算机视觉库,图像处理核心工具
PCL
点云库,激光雷达数据处理
PyTorch
深度学习框架,目标检测模型训练
打开微信扫一扫,分享给朋友